What is Drive-By-Wire? + Buyer’s Guide

Introduction – What is Drive-By-Wire? Developing safe connected, autonomous vehicle technology is hard and time-consuming. What’s more, interfacing an autonomous driving system with any given vehicle is a severely underpublicized industry challenge, especially when considering how to make the entire autonomous system as safe, scalable, and flexible as possible. The system enabling this interface is […]
Teleoperation – getting the world closer to autonomous and automated vehicles

StreetDrone’s mission is to enable low-speed autonomous vehicles to work for the benefit of people as soon as possible, and as such we’re always looking for safe ways to advance the deployment of this technology. Utilising connectivity (whether it’s 4G, 5G or beyond) will be essential to getting autonomous vehicles (AVs) onto both public and […]
Today, we’re releasing our Safety Report, entitled “Putting Safety First in Autonomous Vehicles”
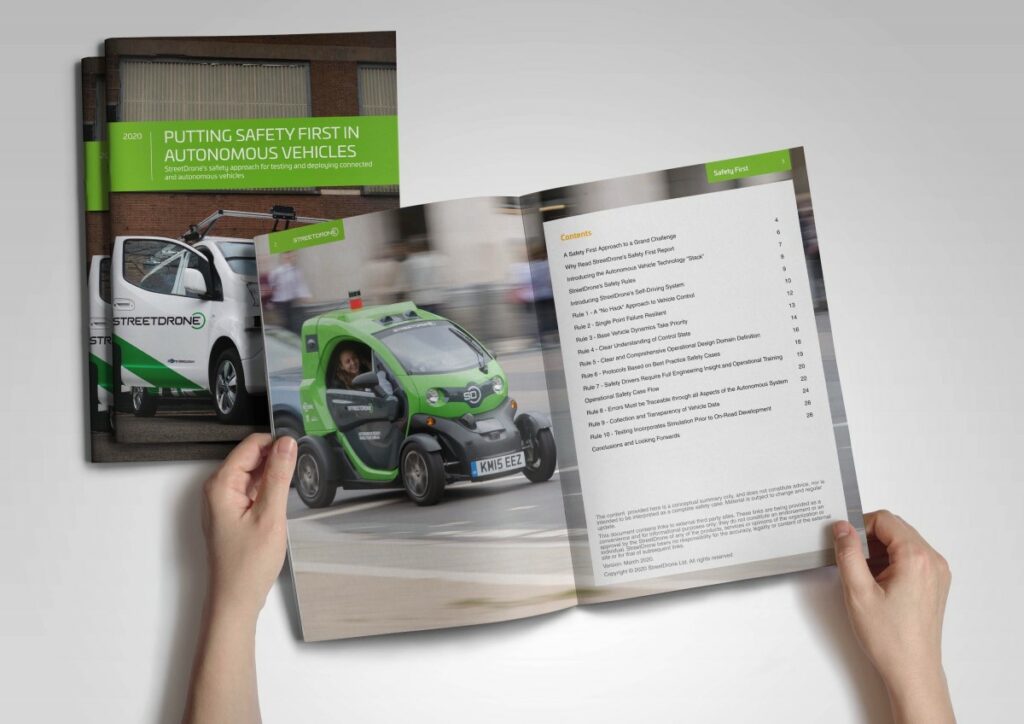
StreetDrone’s safety approach for testing and deploying connected & autonomous vehicles. With many other considerations at the forefront of people’s minds, the StreetDrone team has spent some of their remote working time thinking about our approach to safety. Together we have compiled a document that summarises our approach and adds to the wider industry’s discussion […]
StreetDrone – An ODD Ambition to Meet Need
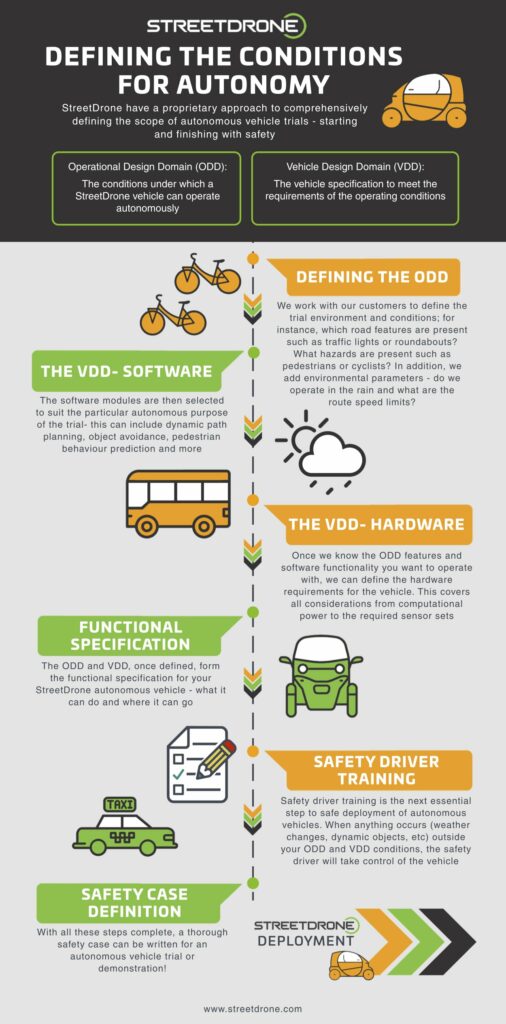
StreetDrones ODD and VDD Definition Process
Talk To Me, KITT

As a safety-led autonomous urban trial company with a focus on the challenging ‘zone 1’ restrictive metropolitan environments around the world, we at StreetDrone are uniquely focused on the interaction between a moving vehicle and its environment. In truth, a cityscape presents far more potential for hazard and it is precisely that challenge that we […]